పరిచయం
1960ల చివరి నుండి మరియు 1970ల ప్రారంభం నుండి, చాలా సాంప్రదాయ వైమానిక ఫోటోగ్రఫీ వ్యవస్థలు వాయుమార్గ మరియు అంతరిక్ష ఎలక్ట్రో-ఆప్టికల్ మరియు ఎలక్ట్రానిక్ సెన్సార్ వ్యవస్థల ద్వారా భర్తీ చేయబడ్డాయి. సాంప్రదాయ వైమానిక ఫోటోగ్రఫీ ప్రధానంగా దృశ్య-కాంతి తరంగదైర్ఘ్యంలో పనిచేస్తుండగా, ఆధునిక వాయుమార్గ మరియు భూమి ఆధారిత రిమోట్ సెన్సింగ్ వ్యవస్థలు దృశ్య కాంతి, ప్రతిబింబించే పరారుణ, ఉష్ణ పరారుణ మరియు మైక్రోవేవ్ స్పెక్ట్రల్ ప్రాంతాలను కవర్ చేసే డిజిటల్ డేటాను ఉత్పత్తి చేస్తాయి. వైమానిక ఫోటోగ్రఫీలో సాంప్రదాయ దృశ్య వివరణ పద్ధతులు ఇప్పటికీ సహాయపడతాయి. అయినప్పటికీ, రిమోట్ సెన్సింగ్ విస్తృత శ్రేణి అనువర్తనాలను కవర్ చేస్తుంది, వీటిలో లక్ష్య లక్షణాల సైద్ధాంతిక మోడలింగ్, వస్తువుల వర్ణపట కొలతలు మరియు సమాచార వెలికితీత కోసం డిజిటల్ ఇమేజ్ విశ్లేషణ వంటి అదనపు కార్యకలాపాలు ఉన్నాయి.
రిమోట్ సెన్సింగ్, ఇది నాన్-కాంటాక్ట్ లాంగ్-రేంజ్ డిటెక్షన్ టెక్నిక్ల యొక్క అన్ని అంశాలను సూచిస్తుంది, ఇది లక్ష్యం యొక్క లక్షణాలను గుర్తించడానికి, రికార్డ్ చేయడానికి మరియు కొలవడానికి విద్యుదయస్కాంతత్వాన్ని ఉపయోగించే ఒక పద్ధతి మరియు ఈ నిర్వచనం మొదట 1950లలో ప్రతిపాదించబడింది. రిమోట్ సెన్సింగ్ మరియు మ్యాపింగ్ రంగంలో, ఇది 2 సెన్సింగ్ మోడ్లుగా విభజించబడింది: యాక్టివ్ మరియు పాసివ్ సెన్సింగ్, వీటిలో లైడార్ సెన్సింగ్ యాక్టివ్గా ఉంటుంది, లక్ష్యానికి కాంతిని విడుదల చేయడానికి మరియు దాని నుండి ప్రతిబింబించే కాంతిని గుర్తించడానికి దాని స్వంత శక్తిని ఉపయోగించగలదు.
యాక్టివ్ లిడార్ సెన్సింగ్ మరియు అప్లికేషన్
లైడార్ (కాంతి గుర్తింపు మరియు పరిధి) అనేది లేజర్ సంకేతాలను విడుదల చేసే మరియు స్వీకరించే సమయం ఆధారంగా దూరాన్ని కొలిచే సాంకేతికత. కొన్నిసార్లు ఎయిర్బోర్న్ లిడార్ను ఎయిర్బోర్న్ లేజర్ స్కానింగ్, మ్యాపింగ్ లేదా లిడార్తో పరస్పరం మార్చుకుంటారు.
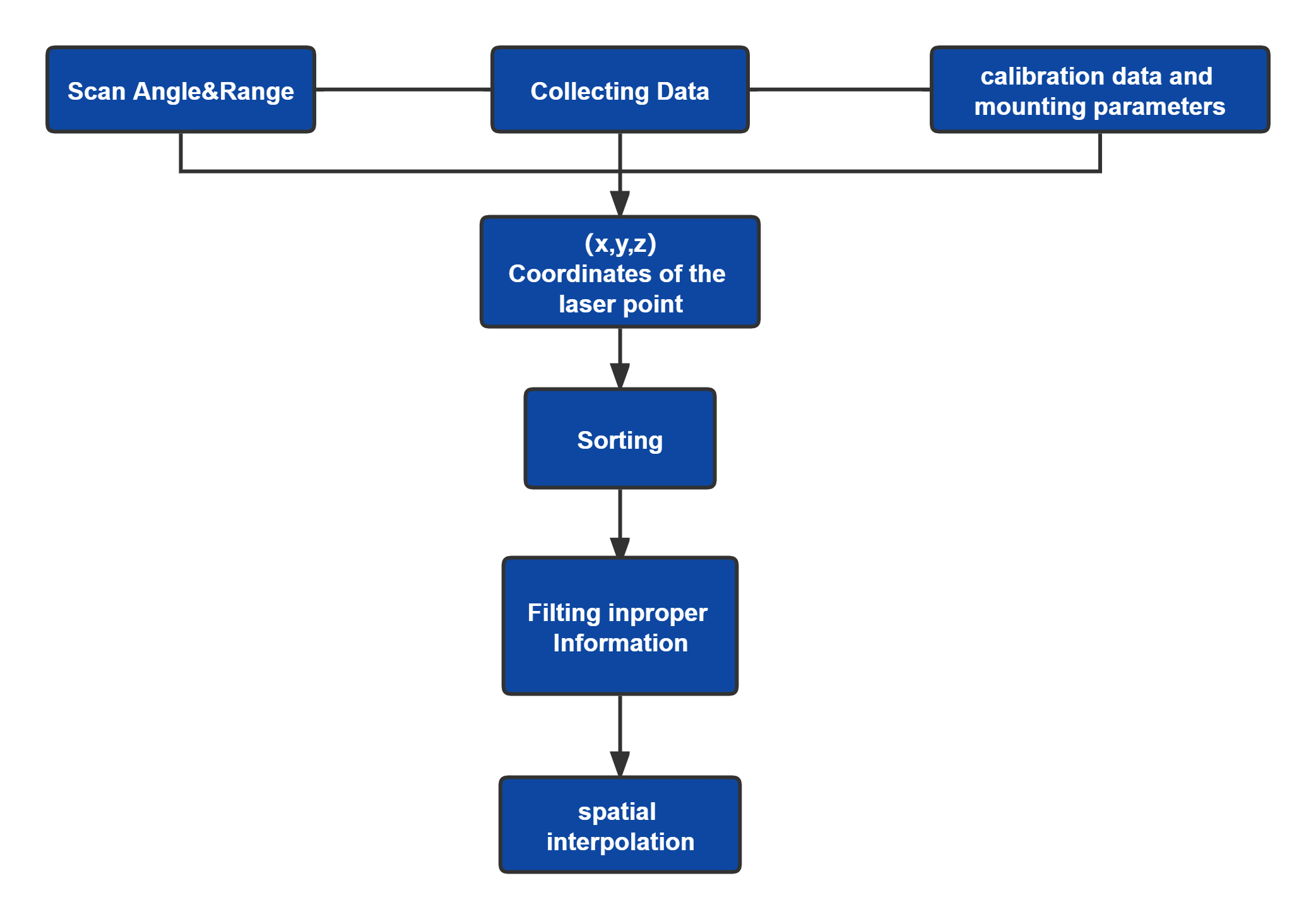
ఇది LiDAR వాడకం సమయంలో పాయింట్ డేటా ప్రాసెసింగ్ యొక్క ప్రధాన దశలను చూపించే ఒక సాధారణ ఫ్లోచార్ట్. ( x, y, z ) కోఆర్డినేట్లను సేకరించిన తర్వాత, ఈ పాయింట్లను క్రమబద్ధీకరించడం వలన డేటా రెండరింగ్ మరియు ప్రాసెసింగ్ సామర్థ్యం మెరుగుపడుతుంది. LiDAR పాయింట్ల రేఖాగణిత ప్రాసెసింగ్తో పాటు, LiDAR ఫీడ్బ్యాక్ నుండి వచ్చే తీవ్రత సమాచారం కూడా ఉపయోగకరంగా ఉంటుంది.
అన్ని రిమోట్ సెన్సింగ్ మరియు మ్యాపింగ్ అప్లికేషన్లలో, LiDAR సూర్యకాంతి మరియు ఇతర వాతావరణ ప్రభావాలతో సంబంధం లేకుండా మరింత ఖచ్చితమైన కొలతలను పొందడంలో ప్రత్యేక ప్రయోజనాన్ని కలిగి ఉంది. ఒక సాధారణ రిమోట్ సెన్సింగ్ సిస్టమ్ రెండు భాగాలను కలిగి ఉంటుంది, లేజర్ రేంజ్ఫైండర్ మరియు పొజిషనింగ్ కోసం కొలత సెన్సార్, ఇది ఎటువంటి ఇమేజింగ్ ప్రమేయం లేనందున (3D ప్రపంచం 2D ప్లేన్లో చిత్రీకరించబడింది) రేఖాగణిత వక్రీకరణ లేకుండా 3Dలో భౌగోళిక వాతావరణాన్ని నేరుగా కొలవగలదు.
మా లిడార్ సోర్స్ లో కొన్ని
సెన్సార్ కోసం కంటికి సురక్షితమైన LiDAR లేజర్ సోర్స్ ఎంపికలు


