వాతావరణ గుర్తింపు పద్ధతులు
వాతావరణ గుర్తింపు యొక్క ప్రధాన పద్ధతులు: మైక్రోవేవ్ రాడార్ సౌండింగ్ పద్ధతి, ఎయిర్బోర్న్ లేదా రాకెట్ సౌండింగ్ పద్ధతి, సౌండింగ్ బెలూన్, శాటిలైట్ రిమోట్ సెన్సింగ్ మరియు LIDAR. వాతావరణానికి పంపబడిన మైక్రోవేవ్లు మిల్లీమీటర్ లేదా సెంటీమీటర్ తరంగాలు కాబట్టి మైక్రోవేవ్ రాడార్ చిన్న కణాలను గుర్తించలేదు, ఇవి దీర్ఘ తరంగదైర్ఘ్యాలను కలిగి ఉంటాయి మరియు చిన్న కణాలతో, ముఖ్యంగా వివిధ అణువులతో సంకర్షణ చెందలేవు.
ఎయిర్బోర్న్ మరియు రాకెట్ సౌండింగ్ పద్ధతులు చాలా ఖరీదైనవి మరియు ఎక్కువ కాలం గమనించలేము. సౌండింగ్ బెలూన్ల ఖర్చు తక్కువగా ఉన్నప్పటికీ, అవి గాలి వేగం ద్వారా ఎక్కువగా ప్రభావితమవుతాయి. ఉపగ్రహ రిమోట్ సెన్సింగ్ ఆన్-బోర్డ్ రాడార్ని ఉపయోగించి ప్రపంచ వాతావరణాన్ని పెద్ద ఎత్తున గుర్తించగలదు, కానీ స్పేషియల్ రిజల్యూషన్ సాపేక్షంగా తక్కువగా ఉంటుంది. వాతావరణంలోకి లేజర్ పుంజాన్ని విడుదల చేయడం ద్వారా మరియు వాతావరణ అణువులు లేదా ఏరోసోల్లు మరియు లేజర్ మధ్య పరస్పర చర్య (వికీర్ణం మరియు శోషణ) ఉపయోగించి వాతావరణ పారామితులను ఉత్పన్నం చేయడానికి లిడార్ ఉపయోగించబడుతుంది.
లేజర్ యొక్క బలమైన దిశాత్మకత, తక్కువ తరంగదైర్ఘ్యం (మైక్రాన్ వేవ్) మరియు ఇరుకైన పల్స్ వెడల్పు మరియు ఫోటోడెటెక్టర్ (ఫోటోమల్టిప్లియర్ ట్యూబ్, సింగిల్ ఫోటాన్ డిటెక్టర్) యొక్క అధిక సున్నితత్వం కారణంగా, లిడార్ వాతావరణ పారామితుల యొక్క అధిక ఖచ్చితత్వం మరియు అధిక ప్రాదేశిక మరియు తాత్కాలిక రిజల్యూషన్ గుర్తింపును సాధించగలదు. దాని అధిక ఖచ్చితత్వం, అధిక ప్రాదేశిక మరియు తాత్కాలిక రిజల్యూషన్ మరియు నిరంతర పర్యవేక్షణ కారణంగా, వాతావరణ ఏరోసోల్స్, మేఘాలు, వాయు కాలుష్య కారకాలు, వాతావరణ ఉష్ణోగ్రత మరియు గాలి వేగాన్ని గుర్తించడంలో LIDAR వేగంగా అభివృద్ధి చెందుతోంది.
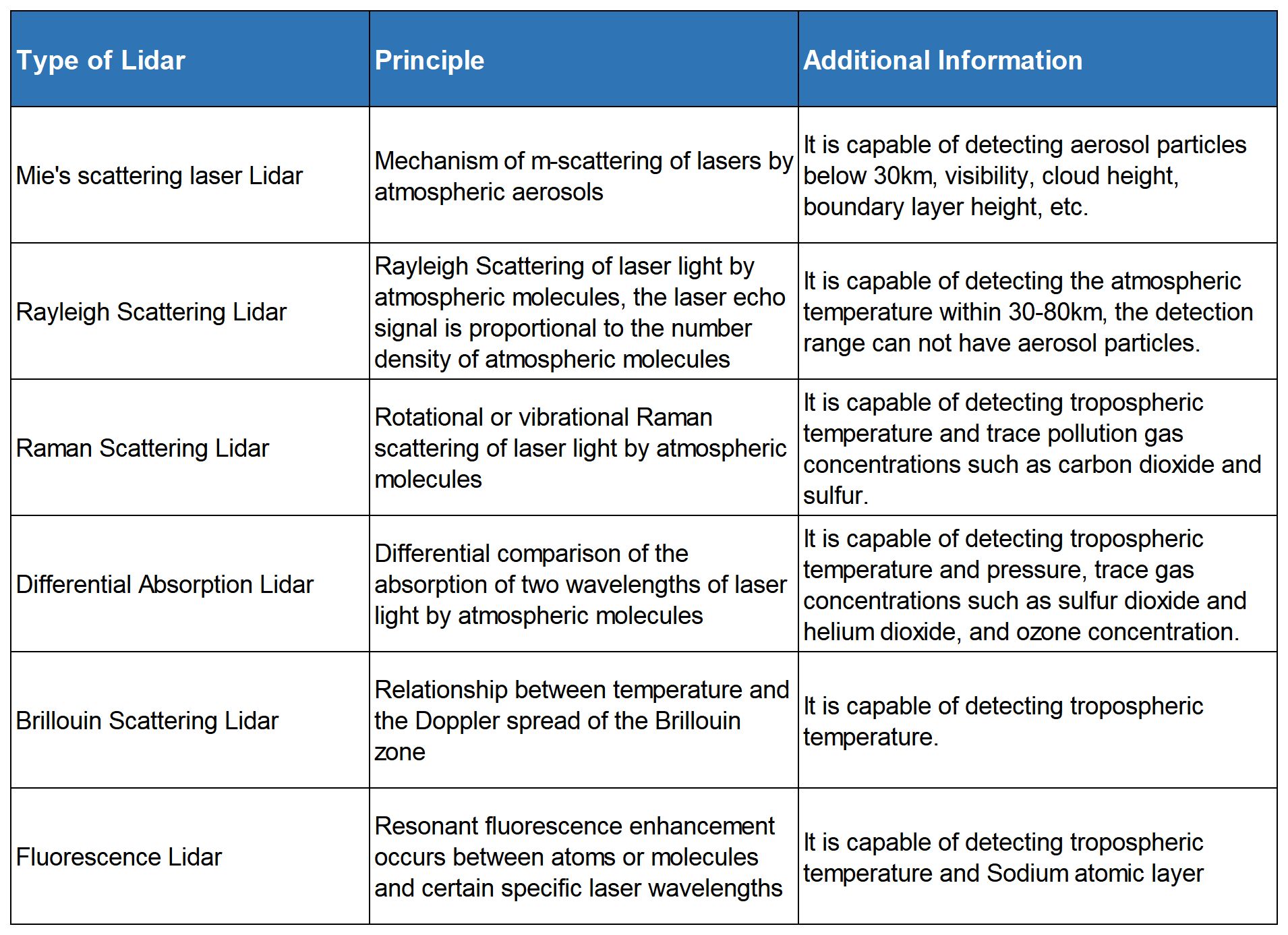
లిడార్ రకాలు క్రింది పట్టికలో చూపించబడ్డాయి:
వాతావరణ గుర్తింపు పద్ధతులు
వాతావరణ గుర్తింపు యొక్క ప్రధాన పద్ధతులు: మైక్రోవేవ్ రాడార్ సౌండింగ్ పద్ధతి, ఎయిర్బోర్న్ లేదా రాకెట్ సౌండింగ్ పద్ధతి, సౌండింగ్ బెలూన్, శాటిలైట్ రిమోట్ సెన్సింగ్ మరియు LIDAR. వాతావరణానికి పంపబడిన మైక్రోవేవ్లు మిల్లీమీటర్ లేదా సెంటీమీటర్ తరంగాలు కాబట్టి మైక్రోవేవ్ రాడార్ చిన్న కణాలను గుర్తించలేదు, ఇవి దీర్ఘ తరంగదైర్ఘ్యాలను కలిగి ఉంటాయి మరియు చిన్న కణాలతో, ముఖ్యంగా వివిధ అణువులతో సంకర్షణ చెందలేవు.
ఎయిర్బోర్న్ మరియు రాకెట్ సౌండింగ్ పద్ధతులు చాలా ఖరీదైనవి మరియు ఎక్కువ కాలం గమనించలేము. సౌండింగ్ బెలూన్ల ఖర్చు తక్కువగా ఉన్నప్పటికీ, అవి గాలి వేగం ద్వారా ఎక్కువగా ప్రభావితమవుతాయి. ఉపగ్రహ రిమోట్ సెన్సింగ్ ఆన్-బోర్డ్ రాడార్ని ఉపయోగించి ప్రపంచ వాతావరణాన్ని పెద్ద ఎత్తున గుర్తించగలదు, కానీ స్పేషియల్ రిజల్యూషన్ సాపేక్షంగా తక్కువగా ఉంటుంది. వాతావరణంలోకి లేజర్ పుంజాన్ని విడుదల చేయడం ద్వారా మరియు వాతావరణ అణువులు లేదా ఏరోసోల్లు మరియు లేజర్ మధ్య పరస్పర చర్య (వికీర్ణం మరియు శోషణ) ఉపయోగించి వాతావరణ పారామితులను ఉత్పన్నం చేయడానికి లిడార్ ఉపయోగించబడుతుంది.
లేజర్ యొక్క బలమైన దిశాత్మకత, తక్కువ తరంగదైర్ఘ్యం (మైక్రాన్ వేవ్) మరియు ఇరుకైన పల్స్ వెడల్పు మరియు ఫోటోడెటెక్టర్ (ఫోటోమల్టిప్లియర్ ట్యూబ్, సింగిల్ ఫోటాన్ డిటెక్టర్) యొక్క అధిక సున్నితత్వం కారణంగా, లిడార్ వాతావరణ పారామితుల యొక్క అధిక ఖచ్చితత్వం మరియు అధిక ప్రాదేశిక మరియు తాత్కాలిక రిజల్యూషన్ గుర్తింపును సాధించగలదు. దాని అధిక ఖచ్చితత్వం, అధిక ప్రాదేశిక మరియు తాత్కాలిక రిజల్యూషన్ మరియు నిరంతర పర్యవేక్షణ కారణంగా, వాతావరణ ఏరోసోల్స్, మేఘాలు, వాయు కాలుష్య కారకాలు, వాతావరణ ఉష్ణోగ్రత మరియు గాలి వేగాన్ని గుర్తించడంలో LIDAR వేగంగా అభివృద్ధి చెందుతోంది.
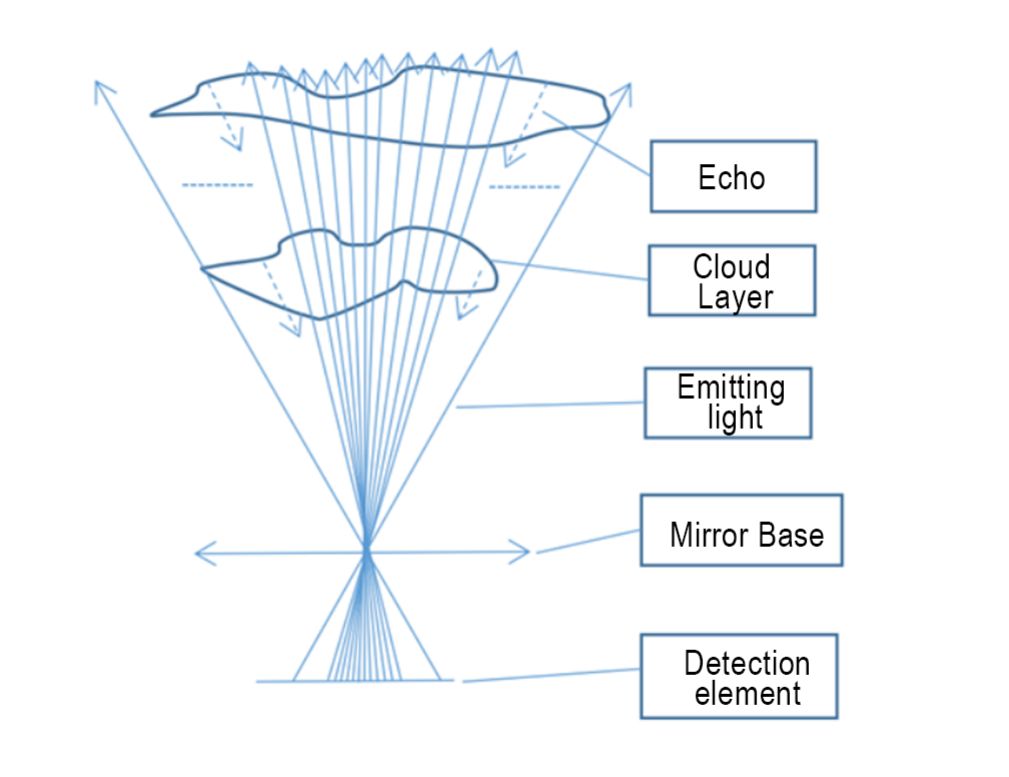
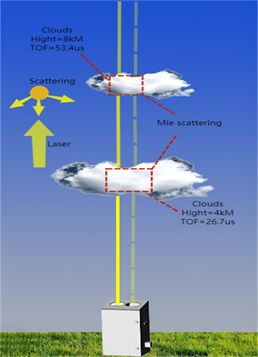
క్లౌడ్ కొలత రాడార్ సూత్రం యొక్క స్కీమాటిక్ రేఖాచిత్రం
మేఘ పొర: గాలిలో తేలియాడే మేఘ పొర; ఉద్గార కాంతి: ఒక నిర్దిష్ట తరంగదైర్ఘ్యం కలిగిన కొలిమేటెడ్ పుంజం; ప్రతిధ్వని: ఉద్గారం మేఘ పొర గుండా వెళ్ళిన తర్వాత ఉత్పత్తి అయ్యే బ్యాక్స్కాటర్డ్ సిగ్నల్; అద్దం బేస్: టెలిస్కోప్ వ్యవస్థ యొక్క సమానమైన ఉపరితలం; గుర్తింపు మూలకం: బలహీనమైన ప్రతిధ్వని సంకేతాన్ని స్వీకరించడానికి ఉపయోగించే ఫోటోఎలెక్ట్రిక్ పరికరం.
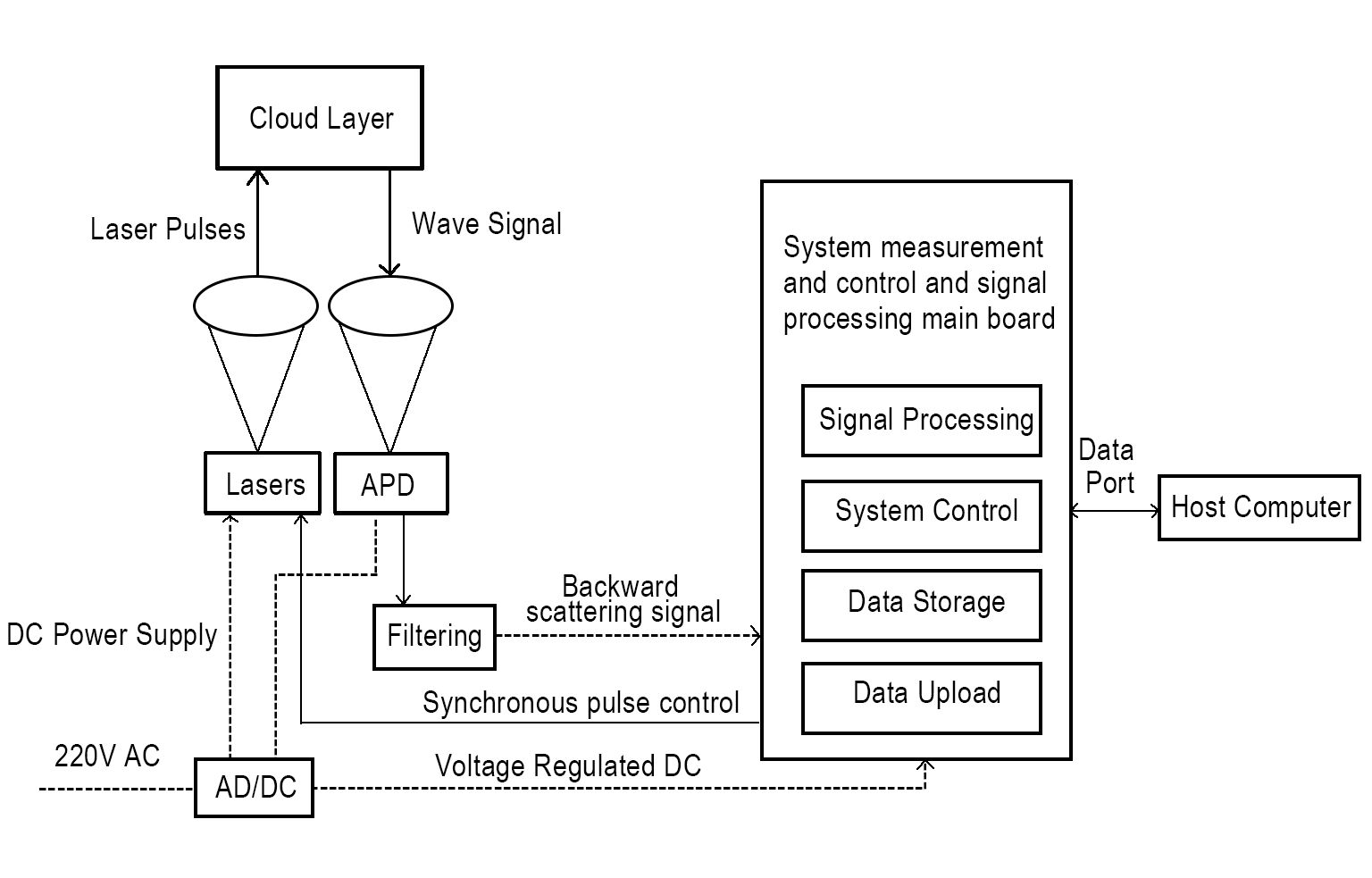
క్లౌడ్ కొలత రాడార్ వ్యవస్థ యొక్క పని చట్రం
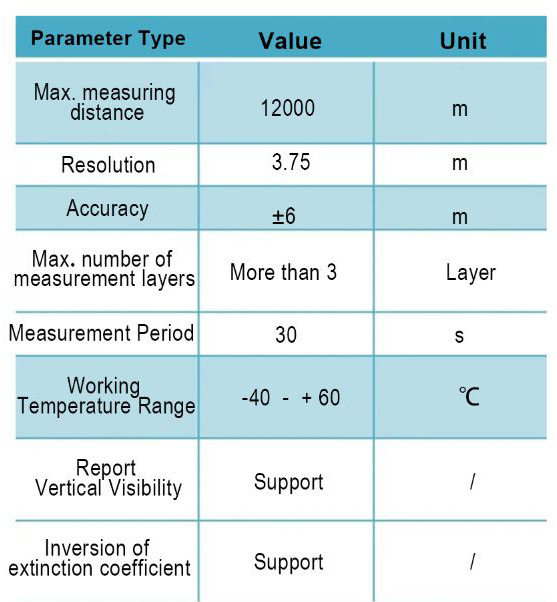
లూమిస్పాట్ టెక్ క్లౌడ్ కొలత లిడార్ యొక్క ప్రధాన సాంకేతిక పారామితులు
ఉత్పత్తి యొక్క చిత్రం

అప్లికేషన్

ఉత్పత్తుల పని స్థితి రేఖాచిత్రం
పోస్ట్ సమయం: మే-09-2023